Arduino Challenge Updates! I added encoder slots to the wheel design for feedback. My pal Rick printed them on his makerbot replicator 3d printer. As you can see the resolution of the printer isn’t fine enough to express the ellipsoids protruding from the tire’s surface (picture 1). After reading up on tire design, it’s best that these ellipsoids are not included for the surfaces this robot will roam around on. So I have reverted back to a simpler smooth surface. Also, looking at the tire that has liquid rubber applied (thanks Rick), you can see the encoder holes are smaller on the side that was face-down on the 3d printing area. As a precaution, I have increased the size of these encoder holes in the latest design (picture 2).
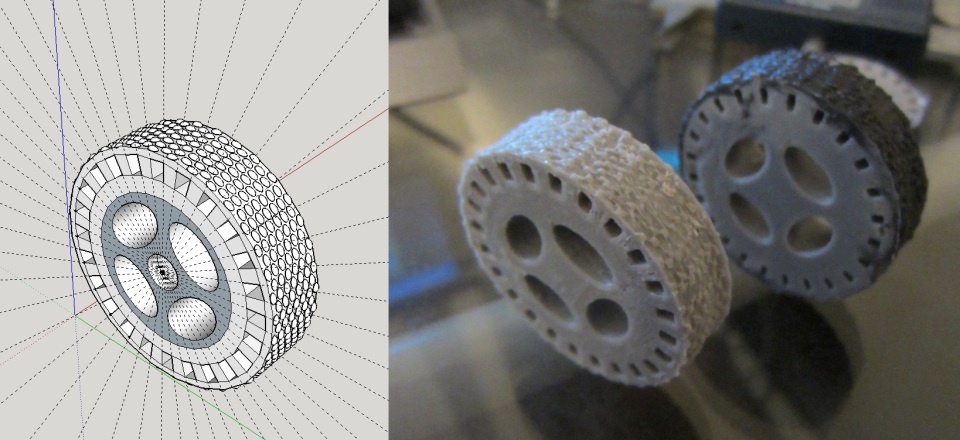
picture 1: 1st draft wheel – printed (far right wheel has liquid rubber applied to the outside)
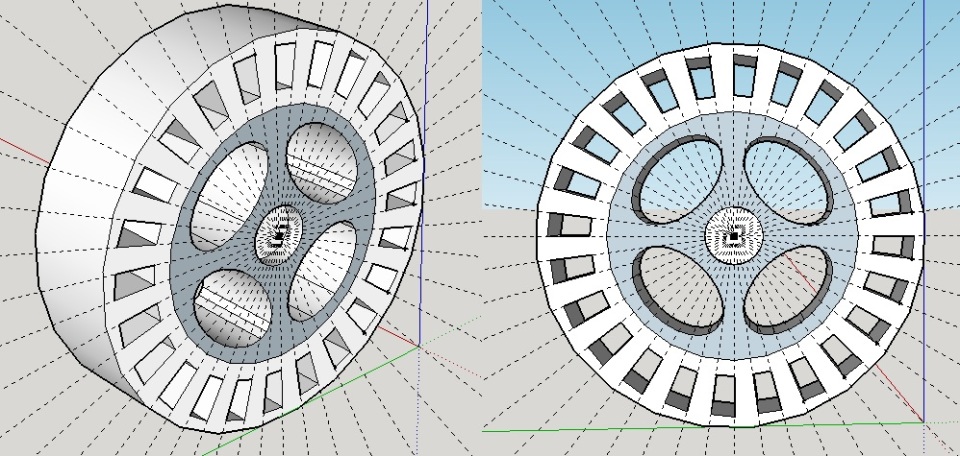
picture 2: updated wheel design with larger encoder holes
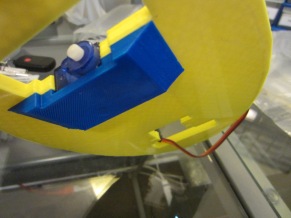
For the base, my original design was to mount the servo sideways and screw it to the side of the base. I showed this design to some fellow contestants at a recent artengine open workshop, and Dave thought the the screwholes were going to be tough to access with a screwdriver, which was one of my concerns. With great input from Peter and Dave, we changed the design to have a platform for the servo and a bracket on top. This assembly will also allow easier access to the motor during prototyping.
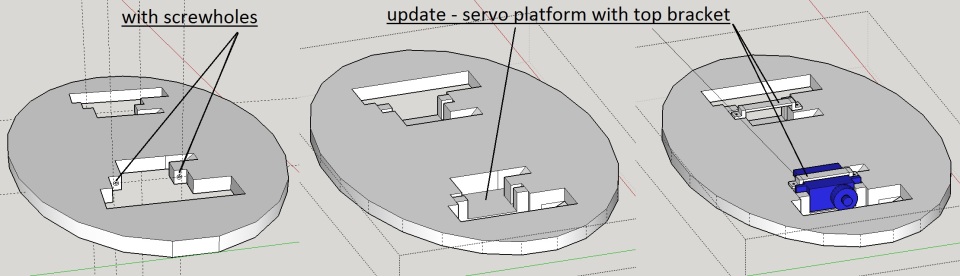
picture 3: robot base update
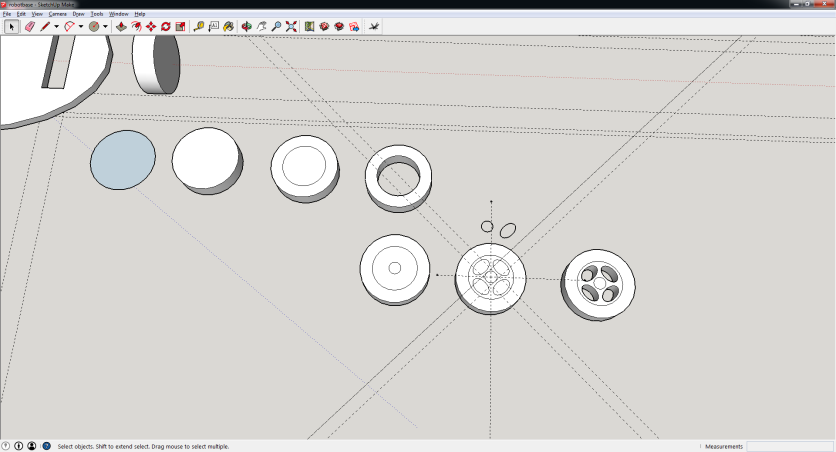
3d printing issue: After 3d-printing a template of the original base design, it was pretty clear that there are scaling issues going from sketchup to the printed parts. It’s hard to really see the difference in the pictures below but my digital caliper shows significant differences in the wheel diameter from sketchup to the real world, and many differences in the base dimensions. Not sure of the cause yet but am looking forward to figure this problem out.
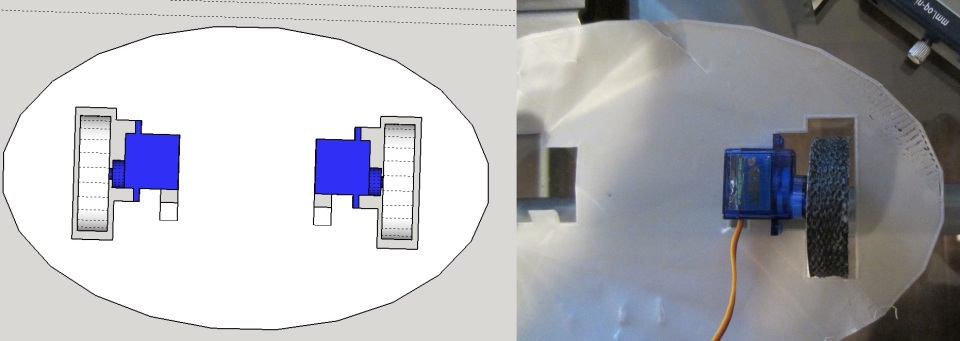
picture 4: from sketchup to the real world